
اطلاعات کلی محصولات
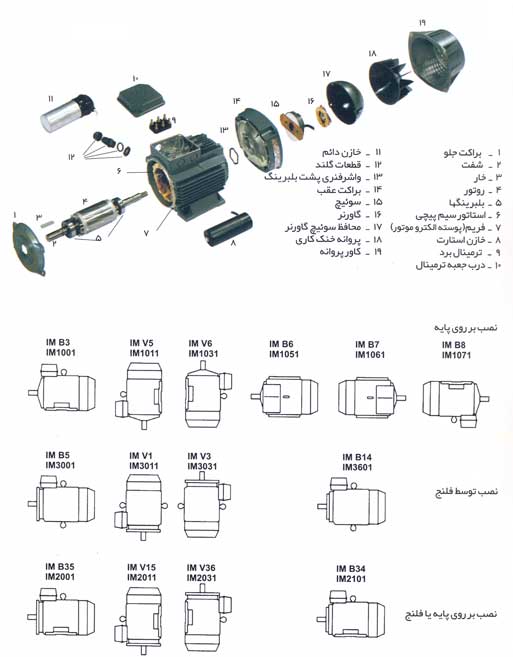
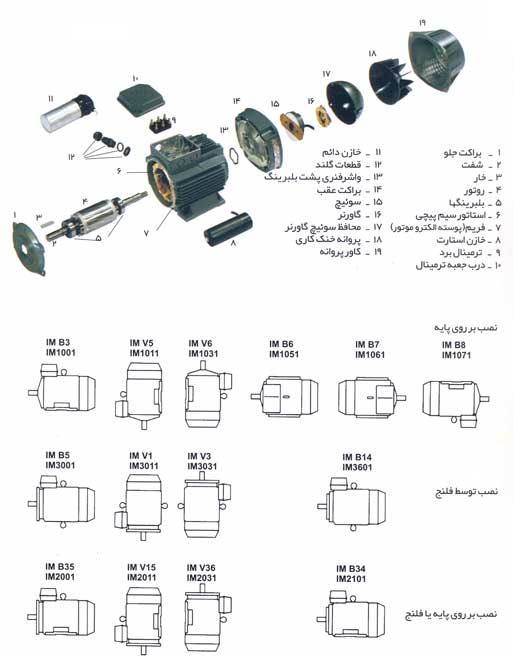
الکتروموتورهای صنعتی موتوژن از نوع بسته بوده شفت: شفت موتورها با یک سر خروجی تولید جعبه ترمینال: جعبه ترمینال به صورت یکپارچه با فریم تهویه موتورها: پروانه موتورها از جنس پلی آمید با فریم: فریم الکتروموتورها تا سایز 160 از آلیاژ بلبرینگ: بلبرینگ های مورد استفاده تا سایز فریم درجه حفاظت: میزان حفاظت موتورها در مقابل نفوذ ذرات ولتاژ و فرکانس: الکتروموتورهای صنعتی موتوژن بطور معمول برای فرکانس 50HZ و ولتاژهای مطابق با جداول مشخصات نامی اثر تغییرات ولتاژ و فرکانس منبع تغذیه: براساس استاندارد IEC60034-1 تغییرات مجاز مشخصات کارایی: براساس استاندارد IEC60034-1 تغییرات زیر در مشخصات کارآیی مجاز می باشند اتصال زمین: الکتروموتورها دارای دو محل اتصال زمین اضافه بار: الکتروموتورها بعد از رسیدن به دمای کاری گشتاور اضافی لحظه ای: الکتروموتورها در ولتاژ و فرکانس نامی |
 |
الکتروموتورهای کولری
تولید الکتروموتورهای کولری از سال 1355 تحت
مطابق استاندارد آمریکایی NEMA-MG1 Part4
شفت الکتروموتورهای کولری با یک سر خروجی تولید
روتورها از نوع قفس سنجابی و با آلومینیوم خالص
درپوش های الکتروموتورهای کولری از آلیاژ مشخص شده است.
مطابق استاندارد NEMA-MG1 Part6 شیوه خنک کاری
الکتروموتورهای کولری موتوژن به گونه ای طراحی
مطابق استاندارد NEMA-MG1 Part5 و معادل آن |
 |
اساس موتورهای القایی AC
مقدمه:
موتورهای القایی AC عمومی ترین موتورهایی هستند که در سامانه های کنترل حرکت صنعتی و همچنین خانگی استفاده می شوند.طراحی ساده و مستحکم , قیمت ارزان , هزینه نگه داری پایین و اتصال آسان و کامل به یک منبع نیروی AC امتیازات اصلی موتورهای القایی AC هستند.انواع متنوعی از موتورهای القایی AC در بازار موجود است.موتورهای مختلف برای کارهای مختلفی مناسب اند.با اینکه طراحی موتورهای القایی AC آسانتر از موتورهای DC است , ولی کنترل سرعت و گشتاور در انواع مختلف موتورهای القایی AC نیازمند درکی عمیقتر در طراحی و مشخصات در این نوع موتورهاست.
این نکته در اساس انواع مختلف , مشخصات آنها , انتخاب شرایط برای کاربریهای مختلف و روشهای کنترل مرکزی یک موتورهای القایی AC را مورد بحث قرار می دهد.
اصل ساخت اولیه و کاربری
مانند بیشتر موتورها , یک موتورهای القایی AC یک قسمت ثابت بیرونی به نام استاتور و یک روتور که در درون آن می چرخد دارند ,
که میان آندو یک فاصله دقیق کارشناسی شده وجود دارد.به طور مجازی همه
موتورهای الکتریکی از میدان مغناطیسی دوار برای گرداندن روتورشان استفاده
می کنند.یک موتور سه فاز القایی AC تنها نوعی است
که در آن میدان مغناطیسی دوار به طور طبیعی بوسیله استاتور به خاطر طبیعت
تغذیه گر آن تولید می شود.در حالی که موتورهای DC به وسیله ای الکتریکی یا مکانیکی برای تولید این میدان دوار نیاز دارند.یک موتور القایی AC تک فاز نیازمند یک وسیله الکتریکی خارجی برای تولید این میدان مغناطیسی چرخشی است.
در درون هر موتور دو سری آهنربای مغناطیسی تعبیه شده است.در یک موتور القایی AC یک سری از مغناطیس شونده ها به خاطراینکه تغذیه AC به پیچه های استاتور متصل است در استاتور تعبیه شده اند.بخاطر طبیعت متناوب تغذیه ولتاژ AC بر
اساس قانون لنز نیرویی الکترومغناطیسی به روتور وارد می شود (درست شبیه
ولتاژی که در ثانویه ترانسفورماتور القا می شود).بنابر این سری دیگر از
مغناطیس شونده ها خاصیت مغناطیسی پیدا می کنند.-نام موتور القایی از
اینجاست-.تعامل میان این مگنت ها انرژی چرخیدن یا تورک (گشتاور) را فراهم
می آورد.در نتیجه موتور در جهت گشتاو بوجود آمده چرخش می کند.
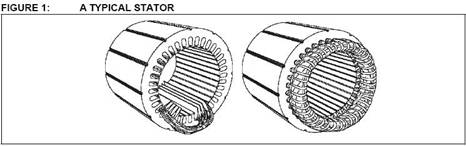
استاتور
استاتور
از چندین قطعه باریک آلومنیوم یا آهن سبک ساخته شده است.این قطعات بصورت
یک سیلندر تو خالی به هم منگنه و محکم شده اند(هسته استاتور) با شیارهایی
که در شکا یک نشان داده شده اند.سیم پیچهایی از سیم روکش دار در این شیارها
جاسازی شده اند.هر گروه پیچه با هسته ای که آن را فرا گرفته یک آهنربای
مغناطیسی (با دو پل) را برای کار کردن با تغذیه AC شکل می دهد.تعداد قطبهای یک موتور القایی AC به
اتصال درونی پیچه های استاتوربستگی دارد.پیچه های استاتور مستقیما به منبع
انرژی متصل اند.آنها به صورتی متصل اند که با برقراری تغذیه AC یک میدان مغناطیسی چرخنده تولید می شود.
روتور
روتور از
چندین قطعه مجزای باریک فولادی که میانشان میله هایی از مس یا آلومنیوم
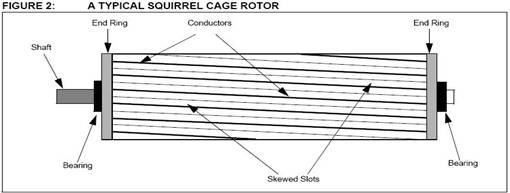
تعبیه شده ساخته شده است.در رایج ترین نوع روتور (روتور قفس سنجابی) این
میله ها در انتهای خود به صورت الکتریکی و مکانیکی بوسیله حلقه هایی به هم
متصل شده اند.تقریبا 90 درصد از موتورهای القایی دارای روتور قفس سنجابی می
باشند و این به خاطر آن است که این نوع روتور ساختی مستحکم و ساده
دارد.این روتور از هسته ای چند تکه استوانه ای با محوری که شکافهای موازی
برای جادادن رساناها درون آن دارد تشکیل شده است.هر شکاف یک میله مسی یا
آلومنیومی یا آلیاژی را شامل می شود.در این میله ها به طور دائمی بوسیله
حلقه های انتهایی آنها همچنان که در شکل دو مشاهده می شود مدار کوتاه
برقرار است.چون این نوع مونتاژ درست شبیه قفس سنجاب است , این نام برای آن انتخاب شده است.میله ای روتور دقیقا با محور موازی نیستند.در عوض به دو دلیل مهم قدری اریب نصب می شوند.
دلیل اول آنکه موتور با کاهش صوت مغناطیسی بدون صدا کارکرده و برای آنکه از هارمونیکها در شکافها کاسته شود.
دلیل دوم آن
است که گرایش روتور به هنگ کردن کمتر شود.دندانه های روتور به خاطر جذب
مغناطیسی مستقیم (محض) تلاش می کنند که در مقابل دندانه های استاتور باقی
بمانند.این اتفاق هنگامی می افتد که تعداد دندانه های روتور و استاتور
برابر باشند.
روتور بوسیله مهار هایی در دو انتها روی محور نصب شده ; یک
انتهای محور در حالت طبیعی برای انتقال نیرو بلندتر از طرف دیگر گرفته می
شود.ممکن است بعضی موتورها محوری فرعی در طرف دیگر(غیر گردنده – غیر منتقل
کننده نیرو) برای اتصال دستگاههای حسگر حالت(وضعیت) و سرعت داشته باشند.بین
استاتور و روتور شکافی هوایی موجود است.بعلت القا انرژی از استاتور به
روتور منتقل می شود.تورک تولید شده به روتور نیرو داده و سپس برای چرخیدن
به آن نیرو می کند.صرف نظر از روتور استفاده شده قواعد کلی برای دوران یکی
است.
سرعت یک موتور القایی
میدان مغناطیسی ای که در استاتور تولید میشود با سرعت سنکرون می چرخد.(Ns)
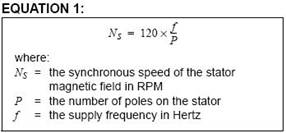
در روتور میدان مغناطیسی تولید می شود زیرا به طور طبیعی ولتاژ متناوب است.
برای کاهش سرعت نسبی نسبت به (شار)استاتور ,
روتور چرخش را در همان جهتی که شار استاتور دارد آغاز می کند و تلاش می
کند تا به سرعت چرخش فلاکس نایل شود.با اینحال روتور هرگز موفق نمی شود که
به سرعت میدان استاتور برسد.روتور از سرعت میدان استاتور کندتر می گردد.این
سرعت Base speed نام دارد.(Nb)
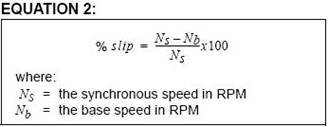
تفاوتها میان Ns و Nb Slip
نام دارد.اسلیپ مقادیر مختلف فشار(مکانیکی) بستگی دارد.هر افزایشی در فشار
موجب کندتر کار کردن روتور و افزایش اسلیپ می شود.برعکس کاهش فشار سبب
سرعت گرفتن روتور و کاهش اسلیپ می شود.اسلیپ بوسیله درصد نشان داده شده و
با فرمول زیر مشخص می شود.
انواع موتورهای القایی
عموما دسته بندی موتورهای القای براساس تعداد پیچه های استاتور است که عبارتند از:
موتورهای القایی تک فاز
موتورهای القایی سه فاز
موتورهای القایی تک فاز
احتمالا بیشتر از کل انواع موتورها از موتورهای القایی AC تک فاز استفاده می شود.منطقی است که باید موتورهای دارای کمترین گرانی و هزینه نگه داری بیشتر استفاده شود. موتور القایی AC
تک فاز بهترین مصداق این توصیف است.آن طور که از نام آن برمیاید این نوع
از موتور تنها یک پیچه (پیچه اصلی) دارد و با یک منبع تغذیه تک فاز کار می
کند.در تمام موتورهای القایی تک فاز روتور از نوع قفس سنجابی است.
موتور القایی
تک فاز خود راه انداز نیست.هنگامی که موتور به یک تغذیه تک فاز متصل است
پیچه اصلی دارای جریانی متناوب می شود.این جریان متناوب میدان مغناطیسی ای
ضربانی تولید می کند.بسبب القا روتور تحریک می شود.چون میدان مغناطیسی اصلی
ضربانی است تورکی که برای چرخش موتور لازم است بوجود نمی آید و سبب ارتعاش
روتور و نه چرخش آن می شود.از این رو موتور القایی تک فاز به دستگاه آغاز
گری نیاز داردکه می تواندضربات آغازی را برای چرخش موتور تولید کند.
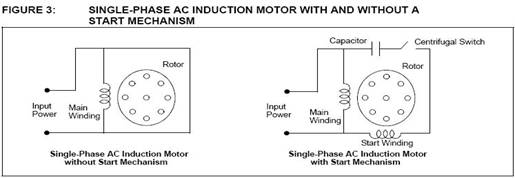
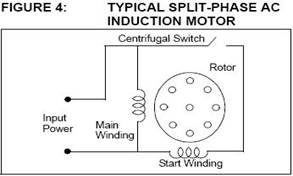
دستگاه آغاز
گر موتورهای القایی تک فاز اساسا پیچه ای اضافی در استاتور است (پیچه کمکی)
که در شکل سه نشان داده شده است.پیچه استارت می تواند دارای خازنهای سری
ویا سوئیچ گریز از مرکز باشد.هنگامی که ولتاژ تغذیه برقرار است جریان در
پیچه اصلی بسبب مقاومت پیچه اصلی ولتاژتغذیه را افت میدهد (ولتاژ به جریان
تبدیل می شود).در همین حین جریان در پیچه استارت بسته به مقاومت دستگاه
استارت به افزایش ولتاژ تغذیه تبدیل می شود.فعل و انفعال میان میدانهای
مغناطیسی که پیچه اصلی و دستگاه استارت می سازند میدان برایندی میسازند که
در جهتی گردش می کند.موتور گردش را در جهت این میدان برایند آغاز میکند.
هنگامی که
موتور به 75 درصد دور مجاز خود می رسد یک سوئیچ گریز از مرکز پیچه استارت
را از مدار خارج می کند.از این لحظه به بعد موتور تک فاز می تواند تورک
کافی را برای ادامه کارکرد خود نگه دارد.
بجز انواع خاص دارای Capacitor start / capacitor run عموماهمه موتورهای تک فاز فقط برای کاربری های بالای 3/4 hp استفاده می شوند.
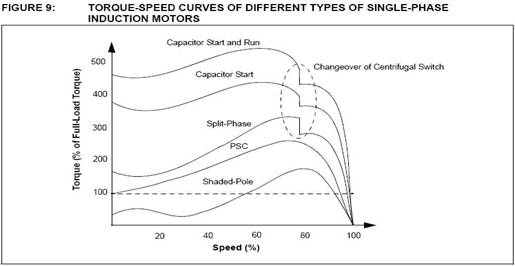
بسته به انواع تکنیکهای استارت موتورهای القایی تک فاز AC در دسته بندی ای وسیع آن گونه که در شکل زیر توصیف شده قرار دارند.
موتور القایی AC فاز شکسته
موتور فاز شکسته همچنین به عنوان Induction start/Induction run (استارت
القایی/کارکرد القایی)هم شناخته می شود که دو پیچه دارد.پیچه استارت از
سیم نازکتر و تعداد دور کمتر نسبت به پیچه اصلی برای بوجود آوردن مقاومت
بیشتر ساخته شده است.همچنین میدان پیچه استارت در زاویه ای غیر از آنچه که
پیچه اصلی دارد قرار می گیرد که سبب آغاز چرخش موتور می شود.پیچه اصلی که
از سیم ضخیم تری ساخته شده است موتور را همیشه درحالت چرخش باقی نگه می
دارد.
تورک
آغازین کم است مثلا 100 تا 175 درصد تورک ارزیابی شده.موتور برای استارت
جریانی زیاد طلب می کند.تقریبا 700 تا 1000 درصد جریان ارزیابی شده.تورک
بیشینه تولید شده نیز در محدوده 250 تا 350 درصد از تورک براوردشده می
باشد.(برای مشاهده منحنی سرعت – گشتاور به شکل 9نگاه کنید).
کاربریهای خوب برای موتورهای فاز شکسته شامل سمباده (آسیاب) های کوچک , دمنده ها و فنهای کوچک و دیگر دستگاههایی با نیاز به تورک آغازین کم با و نیاز به قدرت 1/20 تا 1/3 اسب بخار می باشد.از استفاده از این موتورها در کاربریهایی که به دوره های خاموش و روشن و گشتاور زیاد نیازدارند خود داری نمایید.
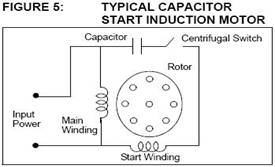
موتور القایی با استارت خازنی
این نوع ,
موتور اصلاح شده فاز شکسته با خازنی سری با آن برای بهبود استارت
است.همانند موتور معمولی فاز شکسته این نوع موتور یک سوئیچ گریز از مرکز
داشته که هنگامی که موتور به 75 درصد سرعت ارزیابی شده می رسد , پیچه استارت را از مدار خارج می نماید.از آنجا که خازن با مدار استارت موازی است , گشتاور استارت بیشتری تولید می کند , معمولا
در حدود 200 تا 400 درصد گشتاور ارزیابی شده.و جریان استارت معمولا بین
450 تا 575 درصد جریان ارزیابی شده است.که بسیار کمتر از موتور فاز شکسته و
بعلت سیم ضخیمتر در مدار استارت است.برای منحنی سرعت گشتاور به شکل 9
مراجعه کنید.
نوع اصلاح
شده ای از موتو با استارت خازنی ، موتور با استارت مقاومتی است.در این نوع
موتور خازن استارت با یک مقاومت جایگزین شده است.موتور استارت مقاومتی در
کاربریهایی مورد استفاده قرار می گیرد که میزان گشتاور استارتینگی کمتر از
مقداری که موتور استارت خازنی تولید می کند لازم است.صرف نظر از هزینه این
موتور امتیازات عمده ای نسبت به موتور استارت خازنی ندارد.
این موتورها در انواع مختلف کاربریهای پولی و تسمه ای مانند تسمه نقاله های کوچک , پمپها و دمنده های بزرگ به خوبی بسیاری از خود گردانها و کاربریهای چرخ دنده ای استفاده می شوند.
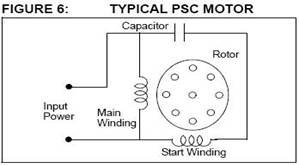
موتورهای AC القایی با خازن دائمی اسپلیت
این موتور (PSC)
نوعی خازن دائما متصل به صورت سری به پیچه استارت دارد.این کار سبب آن
میشود که پیچه استارت تازمانی که موتور به سرعت چرخش خود برسد بصورت پیچه
ای کمکی عمل کند.از آنجا که خازن عملکرد اصلی , باید برای استفاده مداوم طراحی شده باشد , نمیتواند توان استارتی معادل یک موتور استارت خازنی ایجاد نماید.گشتاور استارت یک موتور (PSC) معمولا کم و در حدود 30 تا 150 درصد گشتاور ارزیابی شده است.موتورهای (PSC) جریان استارتی پایین ,
معمولا در کمتر از 200 درصد جریان برآورد شده دارند که آنها را برای
کاربریهایی با سرعتهای دارای چرخه های خاموش روشن بالا بسیار مناسب
میسازد.برای منحنی سرعت – گشتاور به شکل 9 مراجعه کنید.
موتورهای PSC امتیازات
فراوانی دارند.طراحی موتور براحتی برای استفاده با کنترل کننده های سرعت
میتواند اصلاح شود.همچنین می توانند برای بازدهی بهینه و ضریب توان بالا در
فشار برآورد شده طراحی شوند.آنها به عنوان قابل اطمینان ترین موتور تک فاز
مطرح میشوند.مخصوصا به این خاطر که به سوئیچ گریز از مرکز نیازی ندارند.
موتورهای PSC بسته به طراحیشان کاربری بسیار متنوعی دارند که شامل فنها , دمنده ها با نیاز به گشتاور استارت کم و چرخه های کاری غیر دائمی مانند تنظیم دستگاهها (طرز کارها) , عملگر درگاهها و بازکننده های درب گاراژها میشود.
موتورهای AC القایی استارت با خازن/ کارکرد با خازن
این موتور , همانند موتور با استارت خازن , خازنی از نوع استارتی در حالت سری با پیچه کمکی برای گشتاور زیاد استارت دارد.همچنین مانند یک موتور PSC خازنی
از نوع کارکرد که درکنار خازن استارت در حالت سری با پیچه کمکی است که بعد
از شروع به کار موتور از مدار خارج می شود.این حالت سبب بوجود آمدن
گشتاوری در حد اضافی می شود.
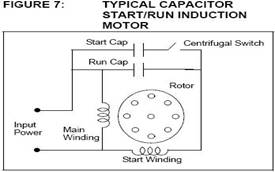
این
نوع موتور می تواند … و بازده بیشتر طراحی شود.(منحنی سرعت – گشتاور در
شکل 9 را ببینید).این موتور بخاطر خازنهای کارکرد و استارت و سوئیچ گریز از
مرکز آن پرهزینه است.
این
موتور می تواند در بسیاری از کاربریهایی که از هرموتور تک فاز دیگری انتظار
میرود استفاده شود.این کاربریها شامل ماشینهای مرتبط با چوب , کمپرسورهای هوا , پمپهای آب فشار قوی , پمپهای تخلیه و دیگر کاربردهای نیازمند گشتاورهای بالا در حد 1 تا 10 اسب بخار می شوند.
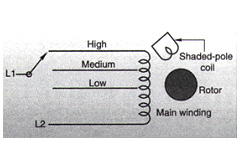
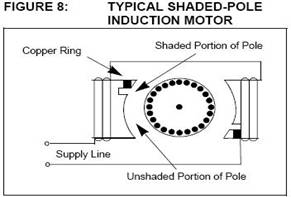
موتور القایی AC با قطب سایه دار
موتورهای با
قطب سایه دار فقط یک پیچه اصلی دارند و پیچه استارت ندارند.استارت خوردن
بوسیله طرح خاص آن که حلقه پیوسته مسی ای را دور قسمت کوچکی از هر قطب
موتور حلقه می کند انجام می شود.این سایه که قطب را دو تکه می کند سبب می
شود که میدان مغناطیسی ای ضعیفتر در ناحیه سایه خورده نسبت به قسمت دیگر و
در کنار آن بوجود آید.تعامل میان میدانها محور را به چرخش وامی دارد.
چون موتور با قطب سایه خورده پیچه استارت , سوئیچ
استارت ویا خازن ندارد از نظر الکتریکی ساده و ارزان است.همچنین سرعت آن
راصرفا با تغییر ولتاژ یا بوسیله یک پیچه با چند دور مختلف می توان کنترل
کرد.
ساخت
موتور با قطب سایه خورده از نظر مکانیکی اجازه تولید انبوه را
میدهد.درحقیقت این موتورها به موتورهای یک بار مصرف معروفند.بدین معنی که
جایگزین کردن آنها ارزانتر از تعمیر آنهاست.
موتورهای
با قطب سایه دار بسیاری مشخصات مثبت دارند.اما چندین مورد بی فایدگی هم
دارند.گشتاور استارت کم آن معمولا 25 تا 75 درصد گشتاور برآوردی است.این
موتور موتوری با اتلاف بالاست که سرعتی حدود 7 تا 10 درصد سرعت سنکرون
دارد.عموما بازده این نوع موتور بسیار پایین است (زیر 20 درصد).
هزینه اولیه
پایین آن را برای قدرت کمتر یا کاربردهای با کار کمتر مناسب می سازد.شاید
وسیعترین استفاده از آنها در فنهای چند سرعته برای استفاده خانگی است.ولی
گشتاور کم موتور دارای قطب سایه دار را برای بیشتر کاربریهای صنعتی یا
تجاری که در آنها کار مداوم یا چرخه های گردش بیشتر معمول است غیر قابل
استفاده می کند.شکل 9 منحنی سرعت – گشتاور را برای انواع موتور القایی AC تک فاز نشان می دهد.
موتور القایی AC سه فاز
موتورهای القایی AC
سه فاز به طور گسترده در کاربریهای تجاری و صنعتی استفاده می شوند.آنها هم
به عنوان موتورهایی با روتور پیچ خورده یا قفس سنجابی دسته بندی می شوند.
این موتورها خود استارت هستند و از هیچ خازن یا پیچه استارت یا سوئیچ گریز از مرکز یا دستگاه آغازگری استفاده نمی کنند.
آنها گشتاور
آغازین در درجه های متوسط یا بالا تولید می نمایند.محدوده نیروی تولیدی و
بازده این موتورها از متوسط تا بالا با مشابه های تک فازشان مقایسه می
شود.استفاده های عمومی آنها مانند آسیابها (و لیث ها دستگاه برنده و فرم
دهنده چوب و فلز) مته فشاری پمپها کمپرسورها تسمه نقاله ها همچنین
دستگاههای چاپ دستگاههای مزرعه سرمایش در الکترونیک و دیگر کاربریهای
مکانیکی است.
موتور قفس سنجابی
تقریبا 90 درصد موتورهای القایی AC سه
فاز از این نوعند.که روتور آنها از نوع قفس سنجابی است که در ابتدا توضیح
داده شد.محدوده های طبقه بندی نیروی آنها از یک سوم تا چند صد اسب بخار
است.موتورهای این نوعی که در دسته یک اسب بخار به بالا اند در مقایسه با
مشابه های تک فاز کم هزینه ترند و میتوانند در استارت در فشارهای سنگینتر
بکار کنند.
موتور با روتور پیچشی
موتور با
حلقه لغزان یا موتور روتور پیچشی نوعی از موتور القایی قفس سنجابی
است.درحالی که استاتور در این موتور همانند موتور قفس سنجابی است یک سری از
پیچه ها را روی روتور خود دارد که در حالت مدارکوتاه نیستند ولی به یک سری
از رینگهای لغزان ختم می شوند.این پیچه ها در اضافه کردن مقاومتها و
خازنهای خارجی سودمندند.اسلیپ لازم برای تولید گشتاور بیشینه نهایی مستقیما
با مقاومت روتور متناسب است.در موتور با حلقه لغزان مقاومت موثر روتور با
اضافه کردن مقاومت خارجی میان حلقه های لغزان کاهش میابد.
بنابراین امکان بدست آوردن لغزش بیشتر و همچنین گشتاور بیشینه نهایی در سرعتهای کمتر وجود دارد.
یک مقاومت
خارجی می توانددر سرعت تقریبا صفر را نتیجه دهد که گشتاو بیشینه نهایی
بسیار زیادی با جریان استارت کم را تولید می کند.هنگامی که موتور شتاب می
گیرد مقدار مقاومت می تواند کاهش یابد تا مشخصات موتور برای کارهایی با
فشار زیاد مناسب شود.هنگامی که موتور به سرعت اصلی میرسد خازنهای خارجی از
مدار خارج می شوند و این یدین معنی است که اکنون موتور به عنوان یک موتور
القایی استاندارد کار می کند.
این نوع
موتور برای فشارهای مانا (کارهایی با فشار ثابت) که درآنها گشتاور نهایی
باید در سرعت تقریبا صفر تولید شده و موتور درکمترین زمان و با کمترین مصرف
جریان تا سرعت بیشینه شتاب گیرد ایده آل است.***
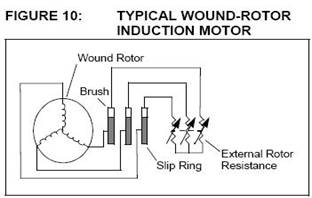
قسمت پایینی موتور با حلقه لغزان که در آن حلقه ها به همراه مجموعه براشها است به نگهداری منظم نیاز داردکه از نظر قیمت ,
استاندارد بودن آن را به عنوان یک موتور قفس سنجابی غیر ممکن می کند.اگر
پیچه ها کوتاهتر شوده و استارت زده شود معمولا جریان بالااز روتور در حالت
متوقف عبورمی کند که در حد 1400 درصد است.درحالیکه در این حالت درآن
گشتاوری در حد 60درصد تولید مینماید که در بسیاری از کاربریها چنین امکان
پشتیبانی چنین چیزی نیست.با تغییر مقاومتهای روتور منحنی سرعت گشتاور تعدیل
می گرددکه بدان وسیله سرعتی که درآن موتور در فشاری مخصوص کارمی کند تعدیل
می شود.ظرفیت تکمیل فشار میتواند سرعت را تا 50درصد سرعت سنکرون کاهش
دهد.خصوصا هنگامی که فشار , از انواعی با
نیاز به گشتاور – سرعتهای مختلف مثل پرسهای چاپ یا کمپرسورها است.کاهش سرعت
تا زیر 50درصد بازده را به خاطر اتلاف انرژی در مقاومتها به شدت کاهش
میدهد.این نوع موتور در کاربریهایی با چرخش با گشتاور و سرعتهای مختلف
مانند پرسهای چاپ , کمپرسورها , تسمه نقاله ها , بالابرنده ها و آسانسورها مورد استفاده قرار می گیرد.
معادله کنترل گشتاور عملکرد موتور
سیستم بار موتور میتواند بوسیله معادله اساسی زیر بیان شود.
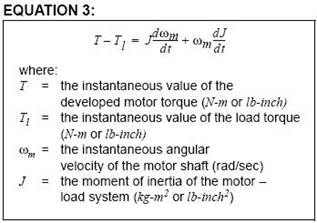
برای چرخشهایی با ماند ثابت داریم: 
این نشان میدهد که گشتاور ایجادشده توسط موتوربا گشتاوربار نسبت عکس دارد.
مولفه گشتاور  گشتاور پویا نامیده می شود زیرا فقط در اعمال زودگذر و آنی ظاهر میشود.اینکه چرخش تسریع یا کند میشود به این بستگی دارد که T از T1 بزرگتر یا کوچکتر باشد.در هنگام شتاب گیری موتور نباید تنها گشتاور بار راتغذیه کند بلکه باید مولفه گشتاور اضافی ای را
گشتاور پویا نامیده می شود زیرا فقط در اعمال زودگذر و آنی ظاهر میشود.اینکه چرخش تسریع یا کند میشود به این بستگی دارد که T از T1 بزرگتر یا کوچکتر باشد.در هنگام شتاب گیری موتور نباید تنها گشتاور بار راتغذیه کند بلکه باید مولفه گشتاور اضافی ای را  برای
برای
چیره شدن به اینرسی داشته باشد.در درایوهایی با اینرسی بزرگ مانند قطارهای
الکتریکی گشتاور موتور برای مقدار بسیار کافی شتابگیری باید از گشتاور بار
تجاوز کند.در درایوهایی با نیاز به واکنش سریع گشتاور موتور باید در
بالاترین مقدارنگه داشته شده و سیستم بار موتور با کمترین مقدار ممکن
اینرسی طراحی شده باشد.انرژی مربوط به گشتاور پویا بصورت انرژی جنبشی (KE) بوجود آمده  ذخیره می شود.در زمان شتابگیری گشتاور پویا علامت منفی دارد.ازین رو به گشتاور تولیدی موتور T و حفظ تحرک چرخش بوسیله استخراج انرژی از انرژی جنبشی ذخیره شده کمک می کند.
ذخیره می شود.در زمان شتابگیری گشتاور پویا علامت منفی دارد.ازین رو به گشتاور تولیدی موتور T و حفظ تحرک چرخش بوسیله استخراج انرژی از انرژی جنبشی ذخیره شده کمک می کند.
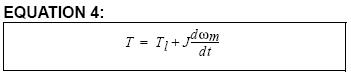
برای خلاصه , برای حالت دائمی چرخش موتورگشتاوری تولیدی موتورT باید همیشه با گشتاور لازم بارT1 برابر باشد.
منحنی سرعت گشتاور موتور القایی سه فاز معمولی در شکل 11 نشان داده شده است.
ویژگی استارتینگ
موتورهای
القایی درحالت خاموش مانند یک ترانسفورماتور درمدار کوتاه عمل می کنند و
اگر کاملا به منبع ولتاژ متصل شوند جریانی بسیار بزرگ می کشند که این جریان
به جریان روتور قفل شده معروف است. همچنین گشتاوری تولید می کند که به
گشتاور روتور قفل شناخته می شود.گشتاور روتور قفل (LRT) و جریان روتور قفل (LRC) تابع
ولتاژ پایانه و تابع طراحی آن می باشند.هنگامی که موتور شتاب می گیرد اگر
ولتاژ ثابت نگه داشته شود هردوی گشتاور و جریان تلاش می کنند که سرعت روتور
را تغیر دهند.
جریان استارت
یک موتور با ولتاژ ثابت با شتاب گرفتن موتوربطوربسیار آهسته کاهش میابد و
صرفا روند نزولی میابد.به خصوص وقتی که موتور به 80 درصد سرعت کامل خود
میرسد.منحنیهای واقعی برای موتورهای القایی میتوانند میان طراحی های مختلف
بسیاربسیارمتفاوت باشند ولی عموما گرایش آنها به جریان بالاست تا وقتی که
متور تقریبا به سرعت کامل میرسد.LRC یک موتور میتواند در محدوده از500 درصد تا 1400 درصد جریان ظرفیت تکمیل (FLC) باشد.معمولا موتورهای خوب در محدوده 550 تا 750درصد از FLC میاشند.
گشتاور استارت یک موتور القایی که با ولتاژ ثابت آغاز به کار می کند , کمی به گشتاور کمینه افت می کند که به Pull-Up torque شناخته می شود.و با شتاب گرفتن موتور در تقریبا سرعت بیشینه به یک گشتاور بیشینه افزایش یافته که به گشتاور شکست یا Pull-Out torque معروف
است و سپس در سرعت سنکرون به صفر نزول می کند.منحنی گشتاور استارت برخلاف
سرعت روتور به ولتاژ پایانه و طراحی روتور بستگی دارد.
LRT یک موتور القایی میتواند از مقدار کم 60 درصد FLT تا 350 درصد آن تغییر کند.Pull-Up torque نیز می تواند به کمی 40 درصد FLT و گشتاور شکست هم می تواند تا حد 350 درصد FLT باشد.معمولا LRT ها برای موتورهای بزرگ تا متوسط دستورا 120 تا 280 درصد FLT میباشد.ضریب توان (PF) با شتاب گرفتن موتور از استارت از .1 تا .25 به مقدار بیشینه افزایش یافته وسپس با رسیدن موتور به سرعت نهایی دوباره سقوط مینماید.
ویژگی عملکرد
هنگامی که موتوربه سرعت خود سرعتی که به تعداد قطبهای استاتور مربوط است رسیده است در میزان خطای کمی نسبت به سرعت سنکرون(Slip) کار
می کند.معمولا میزان این کاستی برای یک موتور قفس سنجابی کمتر از 5 درصد
است.اسلیپ حقیقی نوع خاصی از موتور به طراحی آن بستگی دارد.معمولا سرعت
اصلی یک موتور القایی چهار قطبی بین 1420 تا 1480 دور در دقیقه در فرکانس
50 هرتز متغیر است.در حالی که سرعت سنکرون 1500 دور در دقیقه در فرکانس 50
هرتز است.
ولتاژ
کشیده شده توسط موتور القایی دو جزء دارد:جزءانفعالی (جریان مغناطیسی سازی)
و مولفه موثر (جریان کاری).جریان مغناطیسی سازی مستقل از بار ولی وابسته
به طراحی و ولتاژ استاتور می باشد.جریان مغناطیسی سازی حقیقی موتور القایی
می تواند از مقدار کم 20 درصد FLC برای دستگاه بزرگ دو پل تا بزرگی 60 درصد برای نمونه کوچک هشت پل متغیر باشد.جریان کاری موتوربا بار نسبت مستقیم دارد.
گرایش
دستگاههای بزرگ و پرسرعت به ارائه دادن جریان مغناطیسی سازی کم است درحالی
که گرایش ماشینهای کوچک و کم سرعت به جریان بالای مغناطیسی سازی میباشد.یک
موتور معمولی در سایز متوسط و با چهار پلجریان مغناطیسی سازی ای معادل 33
درصد FLC دارد.
یک جریان کم
مغناطیسی سازی اتلاف کم آهن را دربردارد در حالی که جریان بزرگ مغناطیسی
سازی افزایش در اتلاف آهن و درنتیجه کاهش بازده عملکرد را در پی دارد.
معمولا بازده
عملکرد یک موتور القایی در سه چهارم ظرفیت حداکثر است و از 60درصد برای
موتورهای کوچک کم سرعت تا بیش از 92درصد برای موتورهای بزرگ پرسرعت متنوع
است.ضرایب توان و بازده ها عموما در مشخصات موتورها ذکر شده است.
مشخصه بار
در
واقعیت کاربریهایی با مقادیر مختلف بار با منحنیهای مختلف سرعت گشتاور وجود
دارد.برای نمونه: گشتاور ثابت با بار با سرعت متغیر(در کمپرسورهای پیچشی
تسمه نقاله ها تغذیه کننده ها) , گشتاور متغیر با بار با سرعت متغیر(در فن , پمپ) , توان بار ثابت(در محرکهای انقباضی) , توان و گشتاور بار ثابت(در محرکهای سیم پیچی) و گشتاور بالای استارت و دورگرفتن ناگهانی که در گشتاور ثابت بار(در پمپهای پیچشی , فشرده سازها) مشاهده می شود.
گفته می شود
سیستم بار موتور پایدار است هرگاه گشتاور تولیدی موتور با گشتاور مورد نیاز
بار برابر باشد.در این حالت موتور در یک سرعت ثابت در حالتی مانا کار می
کند.پاسخگویی موتور به هر اختلال ایده ای در مورد پایداری سیستم بار آن به
ما میدهد.این مفهوم به ما در انتخاب سریع نوع موتور برای کاربری خاصی کمک
می کند.
در بیشتر کاربریها ,
واحد زمانی الکتریکی در مقابل واحد زمانی مکانیکی آن ناچیز است.ازین رو
درهنگام اعمال آنی میتوان موتور را در تعادل الکتریکی فرض کرد که بر اینکه
منحنی سرعت – گشتاور حالت پایدار برای اعمال آنی نیز صادق است دلالت دارد.
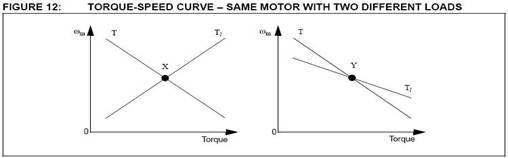
بعنوان نمونه
شکل 12 منحنیهای سرعت – گشتاور موتوری با دو بار مختلف نشان میدهد.میتوان
سامانه را بعد از به حالت اول بازگشتن پس از کمی تغییر به سبب اختلالی در
موتور یا بار ثابت نامید.
برای نمونه اختلال سبب کاهش  در سرعت میشود.درحالت اول در سرعتی جدید گشتاور موتور T از گشتاور بار T1 بزرگتر است.بنابراین موتور شتاب گرفته و عملیات به X باز خواهد گشت.به طور مشابه افزایش در
در سرعت میشود.درحالت اول در سرعتی جدید گشتاور موتور T از گشتاور بار T1 بزرگتر است.بنابراین موتور شتاب گرفته و عملیات به X باز خواهد گشت.به طور مشابه افزایش در
سرعت که بوسیله یک اختلال بوجود میاید و گشتاور بار را از گشتاور موتور
بیشتر خواهد کرد کاهش سرعت موتور وبازگشت حالت عملیات به نقطه X را نتیجه میدهد.بنابراین سیستم در نقطه X پادار است.
در حالت دوم کاهش سرعت سبب بیشتر شدن گشتاور بار از گشتاور مووتور میشود.چرخش کل کند شده و حالت دستگاه از نقطه Y دور میشود.به طور مشابه افزایشیدر سرعت گشتاور موتور را از گشتاور بار فزونی داده که موجب دور شدن بیشتر حالت دستگاه از نقطه Y میشود.بنابر این سامانه در نقطه Y ناپایدار است.
این نشان
میدهد که موتور انتخاب شده برای کاربری در حالت اول صحیح است و انتخاب دوم
انتخابی اشتباه میباشد و برای عمل مورد نظر باید تغییر کند.
انوع بار با منحنیهای سرعت – گشتاورشان در زیر توضیح داده شده اند.
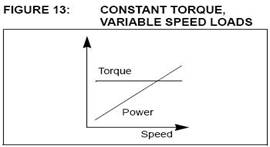
بارهای با سرعت متغیر و گشتاور ثابت
گشتاوری که این نوع بارها نیازدارند صرفنظر از سرعت , ثابت اند.درمقابل نیرو با سرعت نسبت خطی دارد.دستگاههایی نظیر کمپرسورهای پیچشی , تسمه نقاله ها و تغذیه گرها(سوخت رسانها) چنین مشخصات باری دارند.
بارهای با گشتاور متغیر و سرعت متغیر
این عمومی
ترین نوع بار درصنایع بوده و بیشتر اوقات به ع


